
prm motion planning
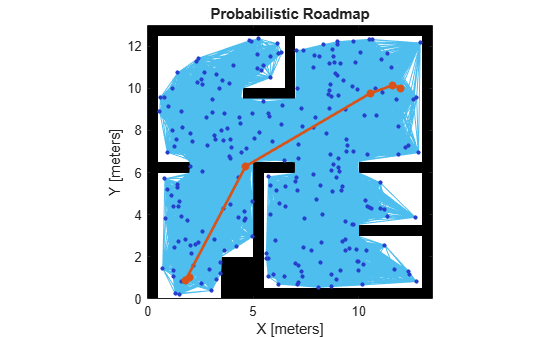
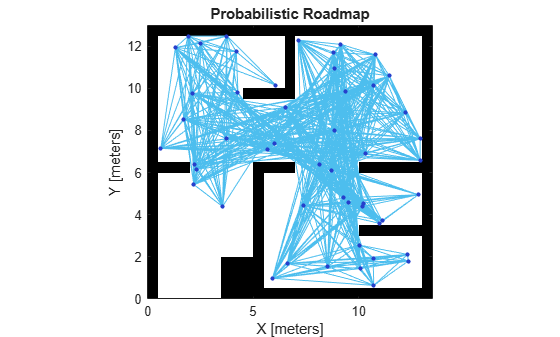
It may be stated as finding a path for a robot or agent such that the robot or agent may move along this path from its initial configuration to goal configuration without colliding with any static obstacles or other robots or agents in the environment. An important property of PRM roadmaps is that they provide a good approximation of the connectivity of the free C-space.
Probabilistic Roadmaps Prm Matlab Simulink
Within this function use the constructor Nodex y parent children index to set the variable selfstart_node.
. Deployed PRM Grid Map A Theta LPA D Lite Potential Field and MPPI. PRMs have been used to solve complex motion planning problems in high-dimensional C-spaces. All autonomous robots and digital actors should eventually have this ability 3 Digital Actors video 1 video 2 4 Basic problem.
Motion planning of a manipulator system is important when using it to complete a task. This figure shows a PRM for a two-dimensional C-space. Only a few recent contributions have ad-dressed issues related to changing environments.
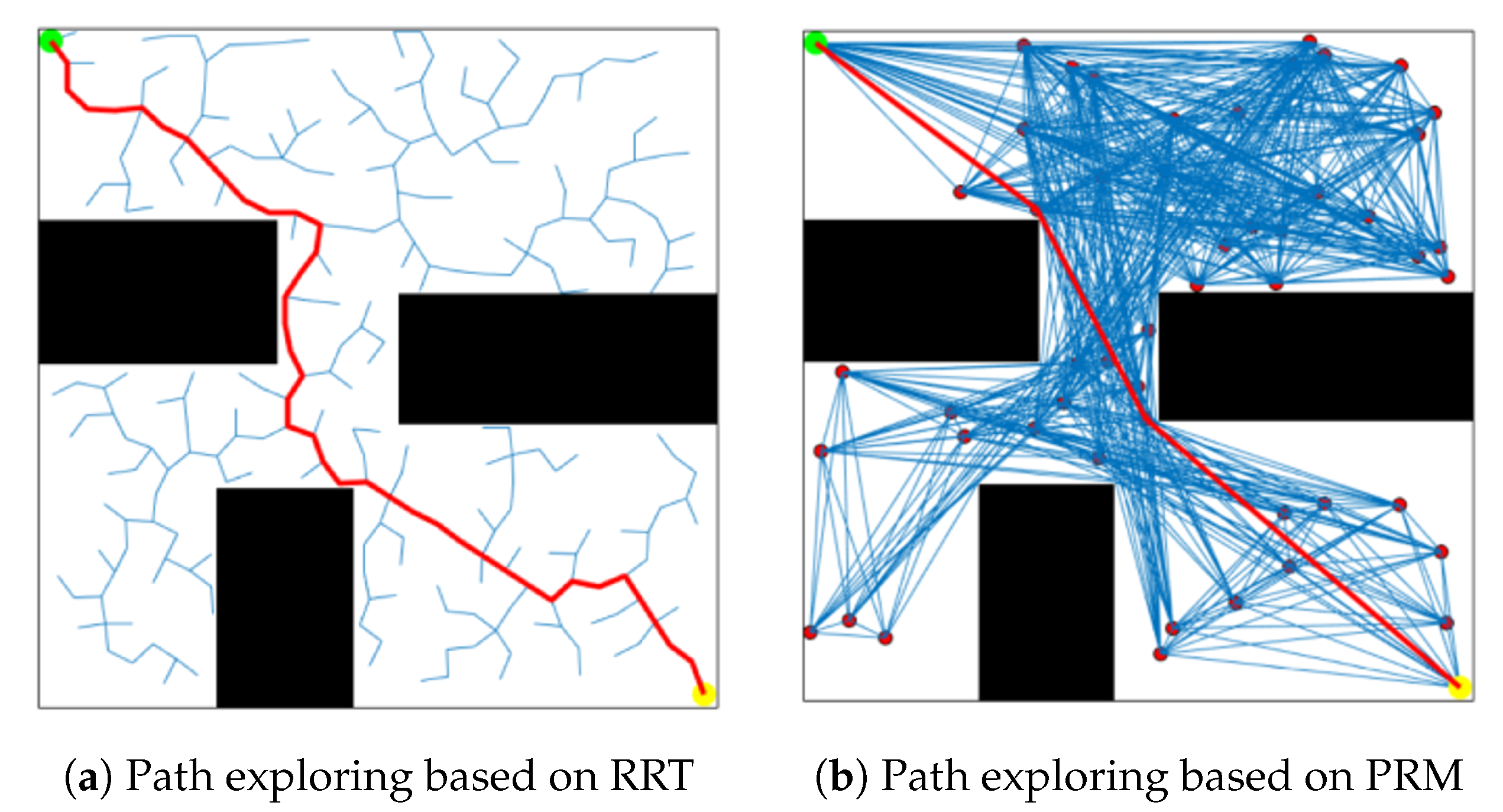
Probabilistic RoadMaps PRM are an effective approach to plan feasible trajectories when these exist. Probabilistic RoadMap Planning PRM by Kavraki samples to find free configurations connects the configurations creates a graph is designed to be a multi-query planner Expansive-Spaces Tree planner EST and Rapidly-exploring Random Tree planner RRT are appropriate for single query problems. Despite the success of the PRM framework work has mostly concentrated on static environments.
In the first phase we generate N samples of the free C-space. These are used later when constructing the trajectory from the PRM. Do not construct the C-space 3.
Check for collision free configuration check for collision free path segment consider that the path between two configurations is a straight line parameterized by 01 sample the interval and check each sample whether its collision free for more details on alternative sampling strategies section 534 motion planning. Using the PRM Motion Planner There are two distinct phases when using PRM motion planning. Motion Planning Its all in the discretization RN.
Set the nodeIndex 0 and parent to None. However PRM planners are unable to detect that no solution exists. X t can encode obstacles.
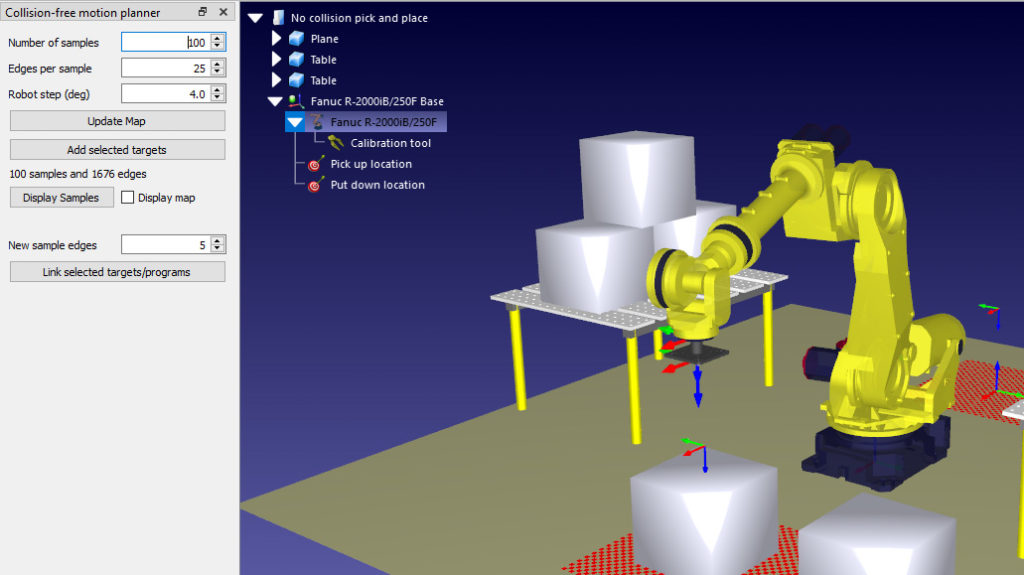
These are performed separately in RoboDK which improves the efficiency of the feature. The plugin courtesy of Federico Ferri exports several API functions related to OMPL. These free configurations can be generated by uniformly randomly sampling the C-space and.
Motion planning is a term used in robotics for the process of breaking down the desired movement task into discrete motions that satisfy movement constraints and possibly optimize some aspect of the movement. The two phases are. 25 gives some background 2 Motion planning is the ability for an agent to compute its own motions in order to achieve certain goals.
In many path planning applications such as planning for evolving industrial environments 13 navigation in real 6 or in virtual worlds 14. The slower construction phase only needs to be performed once whilst the quicker query phase can be repeated many times. Support fast queries w enough preprocessing Many success stories where PRMs solve previously unsolved problems C-obst C-obst C-obst C-obst C.
Or with constraints which would require using an infeasible method. In this study we consider a manipulator system with a. It involves getting a robot to automatically determine how to move while avoiding collisions with obstacles 1.
Its source code can be found here. -- Overview Motion planning is a fundamental problem in robotics. CoppeliaSim offers pathmotion planning functionality via a plugin wrapping the OMPL library.
Following points should be considered when preparing a pathmotion planning task. In particular it supports no complete or partial node and edge validation and various evaluation schedules. Can work surprisingly well but for more complicated problems with longer.
Motion Planning Library to accompany turtlebot3_from_scratch repository. We present a general framework for building and querying probabilistic roadmaps that includes all previous PRM variants as special cases. The call from motion_planselfin E160_robotpy is what initiates the motion planning algorithm.
To construct a PRM we can use this algorithm. Motion planning algorithms are used in many fields including. Apply easily to high-dimensional C-space 4.
Could try by for example following formulation. Master 1 branch 0 tags Go to file Code moribots Generic Trajectory Following MPC 4a479a0 on Jul 25 2021 117 commits Generic Trajectory Following MPC 12 months ago. GitHub - moribotsmotion_planning.
On the other hand a taskmotion planner must often consider many subtasks a fraction of.

How It Works Robodk S New Prm Motion Planner Robodk Blog

Robotic Path Planning Rrt And Rrt By Tim Chinenov Medium

Prm Probabilistic Roadmap Method In 3d And With 7 Dof Robot Arm Youtube
How It Works Robodk S New Prm Motion Planner Robodk Blog
How It Works Robodk S New Prm Motion Planner Robodk Blog

Motionplanninghigherdimensions
How It Works Robodk S New Prm Motion Planner Robodk Blog
Path Planning Using R Prm Download Scientific Diagram
Probabilistic Roadmaps Prm Matlab Simulink

A Lazy Probabilistic Roadmap Planner For Single Query Path Planning Semantic Scholar

Motion Planning Algorithms Rrt Rrt Prm Mit 6 881 Final Project Youtube
Sensors Free Full Text Deep Reinforcement Learning For Indoor Mobile Robot Path Planning Html
2

Multi Robot Systems Motion Planning

Path Planning In Environments Of Different Complexity Matlab Simulink Mathworks Espana
2

The Goal Of Motion Planning Is To Find A Path In Free Space Left A Download Scientific Diagram
2

Sampling Based Planning


0 Response to "prm motion planning"
Post a Comment